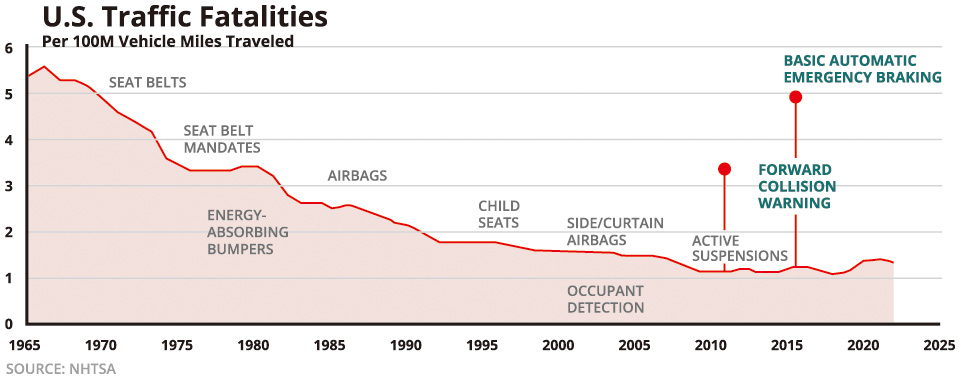
全球每年約有百萬人死於交通事故。在這些交通事故中肇因主要為駕駛者的人為失誤所造成,而近年來導入各式的輔助系統確實有效地降低事故傷亡率。
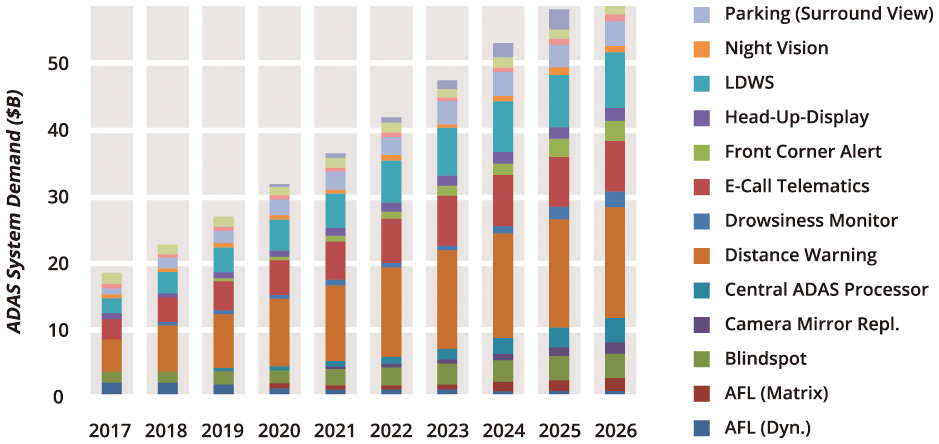
為降低人為因素所造成之交通意外,車廠皆已紛紛投入先進駕駛輔助系統(ADAS)或自駕車(Autonomous Vehicle)相關技術研究開發。目前ADAS系統在市場及技術方面,為了實現各種駕駛輔助功能或自駕車所期望的不同自動駕駛等級,車輛必須配備各種感知器,例如:雷達、光達、攝影機和超音波感知器等。
從BW(Bandwidth)的角度來看,最近的技術要求更高的頻寬及一些架構上的變化:
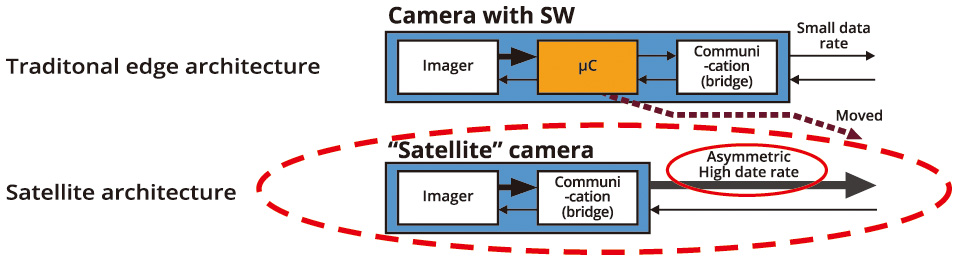
●Sensor(Image,Radar,Lidar)朝向輕量低價的趨勢。例如新的”衛星架構”應運而生,將傳統Edge處理變成中央處理。Sensor 將Raw data或Uncompress data 傳輸到高階CPU處理,進行高階的資料合成(Data fusion)
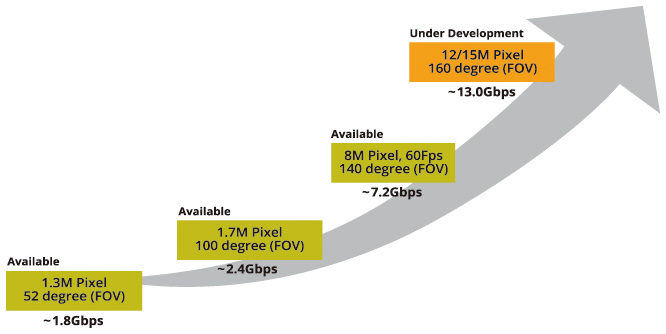
●從Sensor data rate 變換角度來看,Bandwidth現以 3 Mpix(Human)及8 Mpix(Machine)為主,以此 Video BW =Hres x Vres x Fps x Bits per Pixel(12/24-bit)x Overhead(~20%)來計算;8 MP x 60 Fps x 12-bit x 1.25 = ~7.2 Gbps
”衛星架構”,又稱為”衛星工廠架構”。Sensor(衛星工廠)將資料回給主CPU,進一步做Data fusion(Radar-Camera Fusion:CR3DT)。Fusion過後的資料可以大大地強化資料感知力(Perception)給ADAS軟體做更精細的判斷 再搭配以TSN為主的控制系統,可以完美呈現如防撞(FCW)、偏移警示(LDWS)或最終的L5自駕。
衛星架構 Sensor 主要的改變包含:
(1) 以傳統Edge processing 方式,CIS 影像必須先做DSP壓縮(H.264/5)並將其轉換為以太網封包進行傳輸。衛星架構則是把其中的軟體部分整個移除,CIS資料不經過壓縮直接送進執行AI/ML的CPU
(2) Sensor 大部分的時間都是在做資料下載(Down-stream),偶而才會有一些上傳(Up-stream)的控制數據這樣的架構,又稱為非對稱的通訊(Asymmetric communication)
(3) Sensor端軟體(CPU)移除後帶來非常多的好處。Sensor 端不管在機構 散熱等都較傳統CPU的架構為優,另外Raw data 更適用於Data fusion (Camera 或Lidar)
衛星架構採用非對稱的通信方式,市面上非對稱通信的方式有許多種:
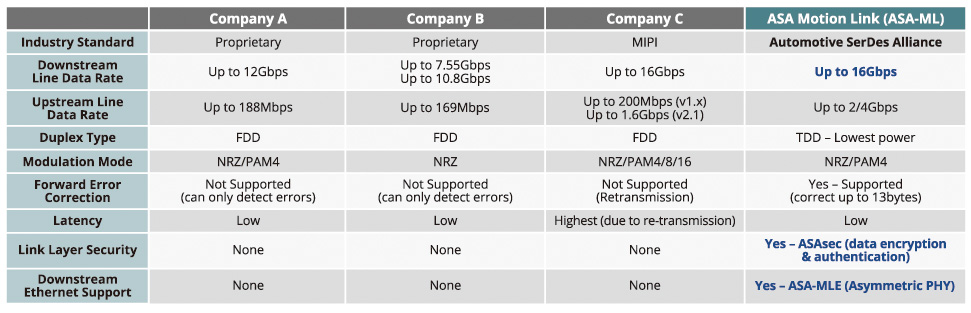
ASA-ML(Automotive Sardes Alliance-Motion Link)是最新的非對稱技術並且改善了先前幾種技術的缺點。它是一個開放規範,有各種不同Sensor supplier可以使用,車廠也開始評估這個技術,加強安全機制,採用TDD(Time-Division Duplexing)可以有較佳的省電管理及很簡單就可以達到同步 (Precise timing based)的機制。
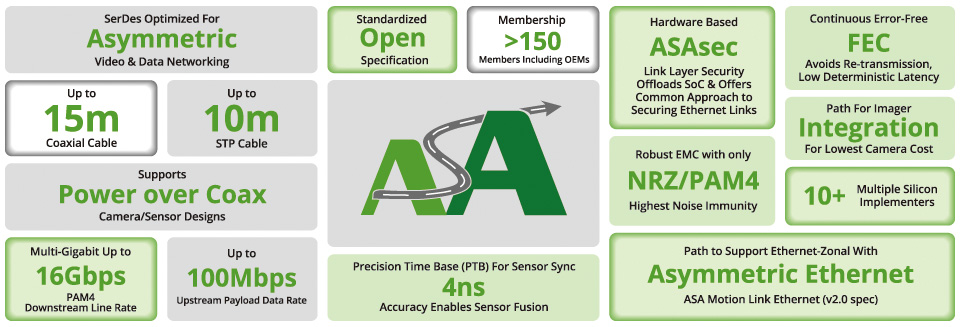
ASA-ML 規範特點如下:
從應用的角度上來看 ASA-ML的應用架構如下:
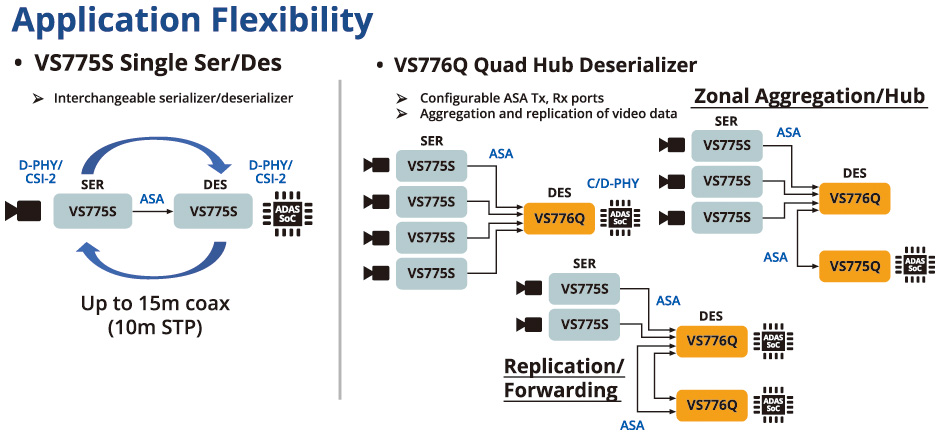
Sensor端必須支持MIPI-D PHY及I2C介面,Microchip ASA-ML芯片會轉換Sensor data 到 ASA-ML 格式,經由Coax(15M)或Twist cable(10M)到計算中心ECU做資料合成,傳輸的速度也可自訂不同的等級。
Microchip支援 ASA-ML架構如下:
如需了解更多有關的應用技術資訊,請參考官網連結如下或連繫Microchip各個銷售據點:
● VS775S | Microchip Technology
● VS776 | Microchip Technology
本文作者為:Microchip資深應用工程師 胡立堅