微型医疗机器人在光纤诊断与介入等应用中,精密的运动致动技术扮演着关键角色。然而,传统电感式致动机制难以微缩化。压电材料虽能提供可微缩、精准、快速且高力的致动方式,却受限於较小的位移范围。近期一项结合压电弯曲梁与柔性运动转换结构的研究,已在机器人微致动领域展现巨大潜力。
 |
| /news/2025/05/29/2019399390S.jpg |
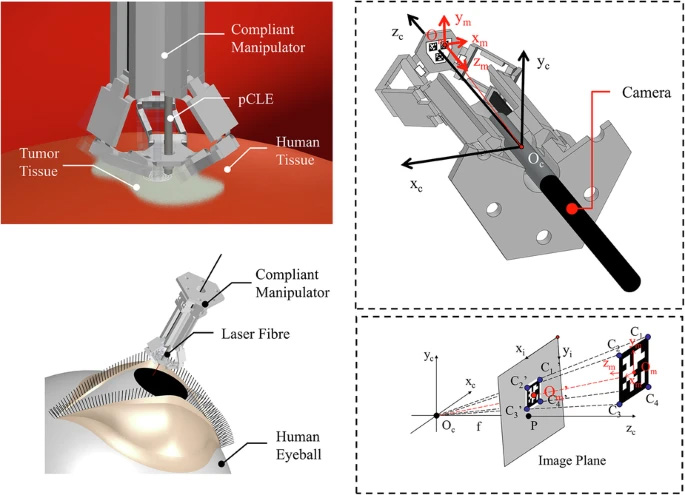
一项最新发表的研究,将此创新方法应用於实作一个三自由度(3 DoF)Delta 型机器人,专为导管、诊断光纤及显微手术工具的操控而设计。此机器人的制造工艺结合了增材制造(3D 列印)、摺纸结构(origami structuring)与压电梁组装。
该研究最引人注目的技术创新在於,其导入了全新内建视觉回??(on-board visual feedback)概念来实现闭??路控制。相较於传统依赖外部摄影机的运动追踪系统,此完全内部化的视觉回??机制大幅提升了系统的紧凑性,并确保了摄影机与标记(marker)之间几何定义的精准性与可靠性。
透过此方法,该 Delta 机器人展现出惊人的运动表现:7.5 微米(μm)的运动准确度、10 微米的解析度,以及 8.1 微米的精准度。研究证明,该机器人能够在这些规格下遵循一系列可程式化的轨迹,并能有效补偿显微手术操作中常见的外部施加力。
据研究团队所知,这是首次成功展示利用内部视觉回??实现微米级运动控制。这项突破为开发高解析度的紧凑型微型机器人奠定了基础。