微型醫療機器人在光纖診斷與介入等應用中,精密的運動致動技術扮演著關鍵角色。然而,傳統電感式致動機制難以微縮化。壓電材料雖能提供可微縮、精準、快速且高力的致動方式,卻受限於較小的位移範圍。近期一項結合壓電彎曲樑與柔性運動轉換結構的研究,已在機器人微致動領域展現巨大潛力。
 |
| /news/2025/05/29/2019399390S.jpg |
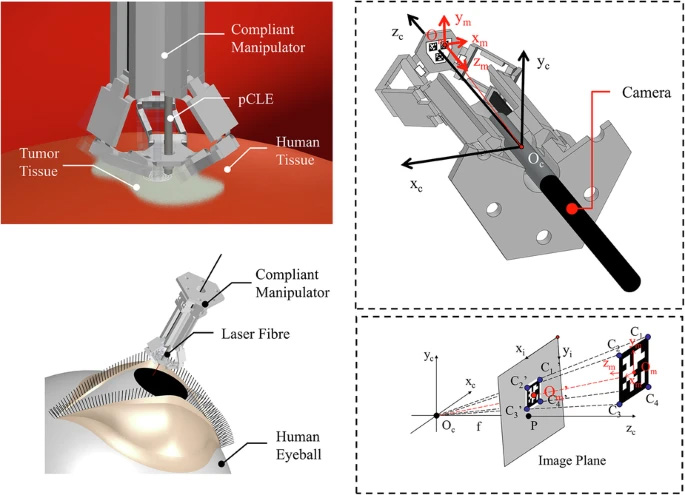
一項最新發表的研究,將此創新方法應用於實作一個三自由度(3 DoF)Delta 型機器人,專為導管、診斷光纖及顯微手術工具的操控而設計。此機器人的製造工藝結合了增材製造(3D 列印)、摺紙結構(origami structuring)與壓電樑組裝。
該研究最引人注目的技術創新在於,其導入了全新內建視覺回饋(on-board visual feedback)概念來實現閉迴路控制。相較於傳統依賴外部攝影機的運動追蹤系統,此完全內部化的視覺回饋機制大幅提升了系統的緊湊性,並確保了攝影機與標記(marker)之間幾何定義的精準性與可靠性。
透過此方法,該 Delta 機器人展現出驚人的運動表現:7.5 微米(μm)的運動準確度、10 微米的解析度,以及 8.1 微米的精準度。研究證明,該機器人能夠在這些規格下遵循一系列可程式化的軌跡,並能有效補償顯微手術操作中常見的外部施加力。
據研究團隊所知,這是首次成功展示利用內部視覺回饋實現微米級運動控制。這項突破為開發高解析度的緊湊型微型機器人奠定了基礎。