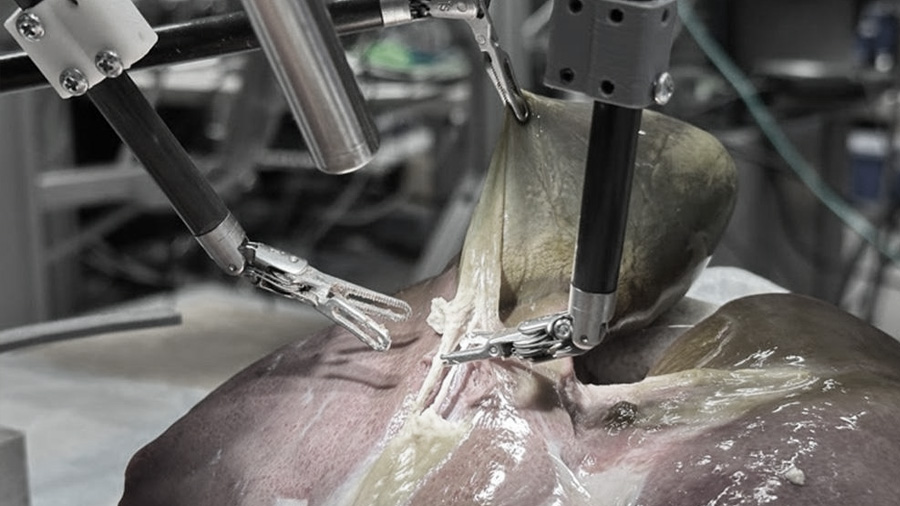
美國約翰霍普金斯大學的科研團隊近日宣布一項重大突破,他們研發的外科手術機器人SRT-H,自主完成了膽囊切除手術中最精細的部分,整個過程無需人類操控機械手臂。
 |
| /news/2025/07/14/1629359790S.jpg |
約翰霍普金斯大學研究主持人表示,這套新系統的行為模式不再像僵硬的工業機械手臂,而更像一位能在實時中學習的「住院醫師」。他的團隊曾在2022年研發出「智慧組織自主機器人」(STAR),雖然它能縫合豬腸,但仍需依賴特殊的追蹤標記。
而最新的平台SRT-H更進一步,它結合了攝影機影像與一種語言條件分層(language-conditioned hierarchy)系統,能精確指示每個馬達的移動。SRT-H 不再遵循固定的預設程序,而是根據它在病患體內所觀察到的情況以及團隊的語音指令,來選擇下一步動作。
在研究中,SRT-H 連續完成了17項任務,包括在微小動脈上夾止血夾、切割組織,以及當染料模糊視野時進行重新定位。其表現已能與資深外科醫生媲美,儘管機器完成整個過程比人類多花費幾分鐘。
SRT-H的學習方式並非透過程式碼編寫,而是像觀看 YouTube 影片一樣。它透過觀看外科醫生在豬屍體上進行膽囊切除術的影片,每個片段都配有通俗易懂的文字說明。這些文字標籤形成了高階策略可調用的「手勢食譜」,而低階控制器則能以毫秒為單位精修手腕角度。
外科醫生之所以選擇膽囊進行早期自主手術試驗,是因為膽囊位置相對固定,但同時又涉及膽管、血管和滑膩脂肪的複雜組合。膽總管上的一個小錯誤夾閉就可能導致終生併發症,因此,即使是微小的精準度提升,也能為成千上萬的患者避免重複手術。
研究中,即使研究人員將周圍組織染成紅色,SRT-H仍然能夠辨識出膽囊動脈,而這種染料往往會干擾電腦視覺。這種韌性至關重要,因為真實的人體腹腔很少像教科書中的圖示那樣整潔。
不同於工廠中重複焊接動作的機器人,SRT-H 透過分層策略(hierarchical policy)來選擇行動方案。它能用通俗的語言設定目標,然後將這些目標轉化為馬達指令。這種方法類似於引導GPT-4等大型語言模型的提示方法。
研究者表示,就像外科住院醫生常以不同速度掌握手術的不同部分一樣,這項工作展示了以類似模組化和漸進方式開發自主機器人系統的潛力。這種分層設計也讓工程師無需重寫整個演算法,就能替換更好的感知模組。
未來,SRT-H 的更新目標是能夠從第一刀到皮膚縫合,自主完成整個膽囊切除術,並擴展到疝氣修復和腸道切除等手術。這項研究已發表於《科學機器人學》(Science Robotics)期刊。